Robots & Design
Design plays a fundamental role in engineering and how well its solutions can be implemented in the real world. Pablo Valdivia y Alvarado Ph.D.
Design plays a fundamental role in engineering and how well its solutions can be implemented in the real world. Pablo Valdivia y Alvarado Ph.D.

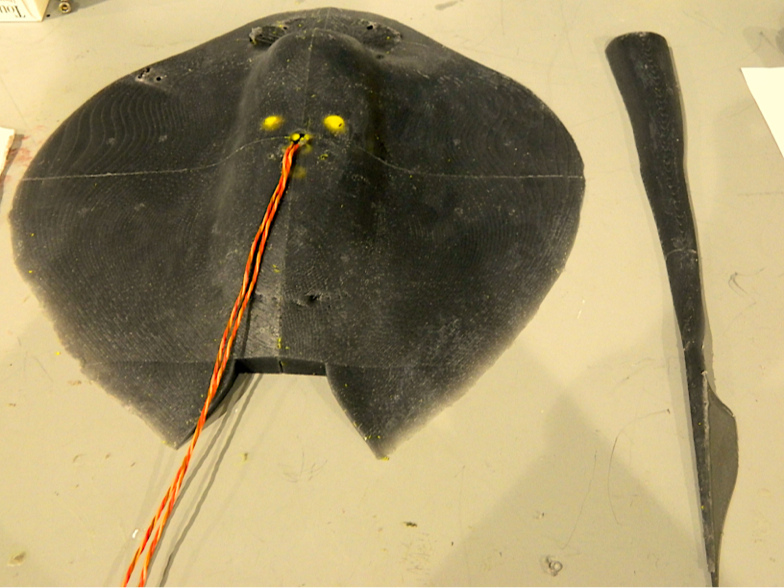
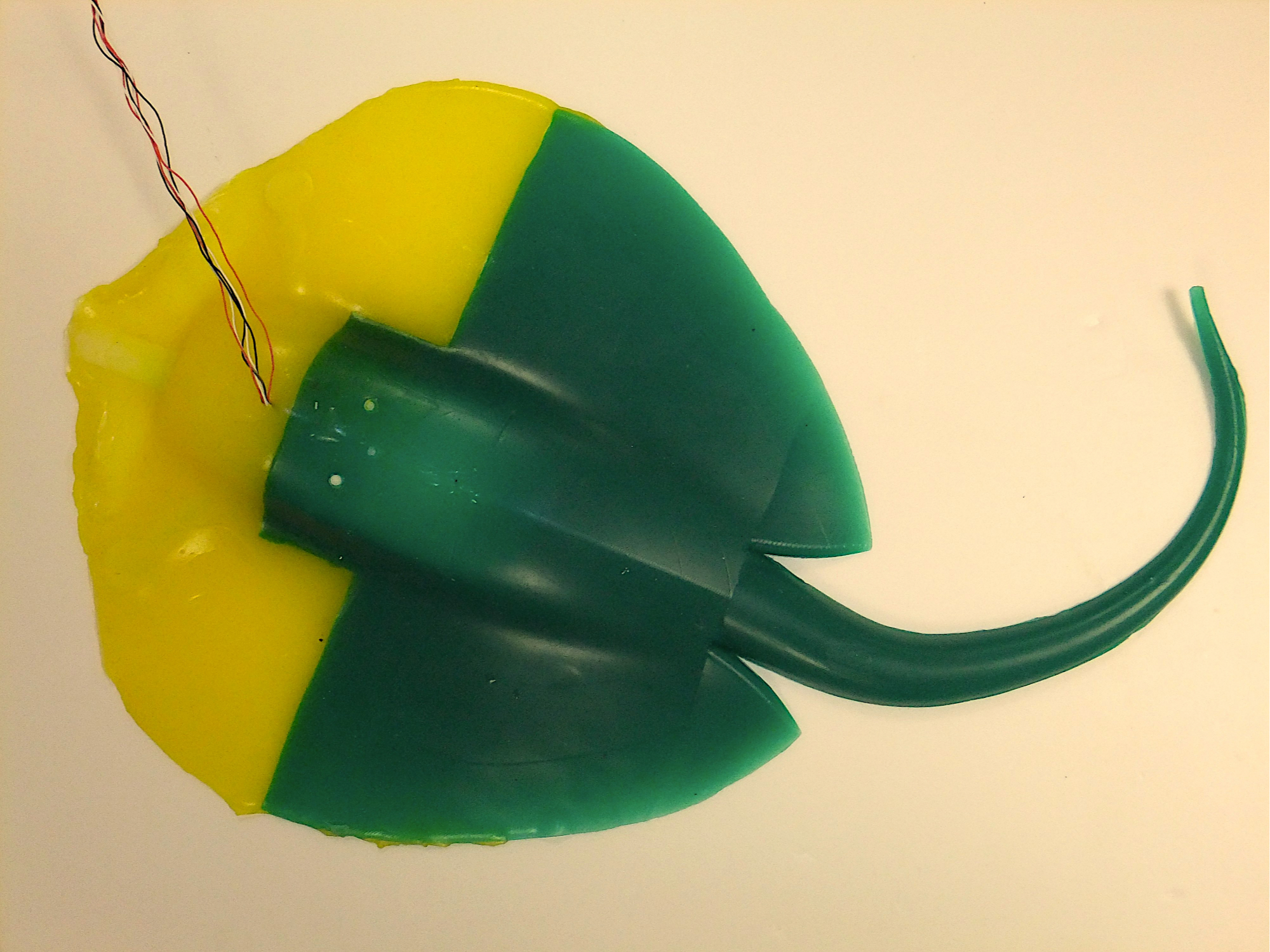
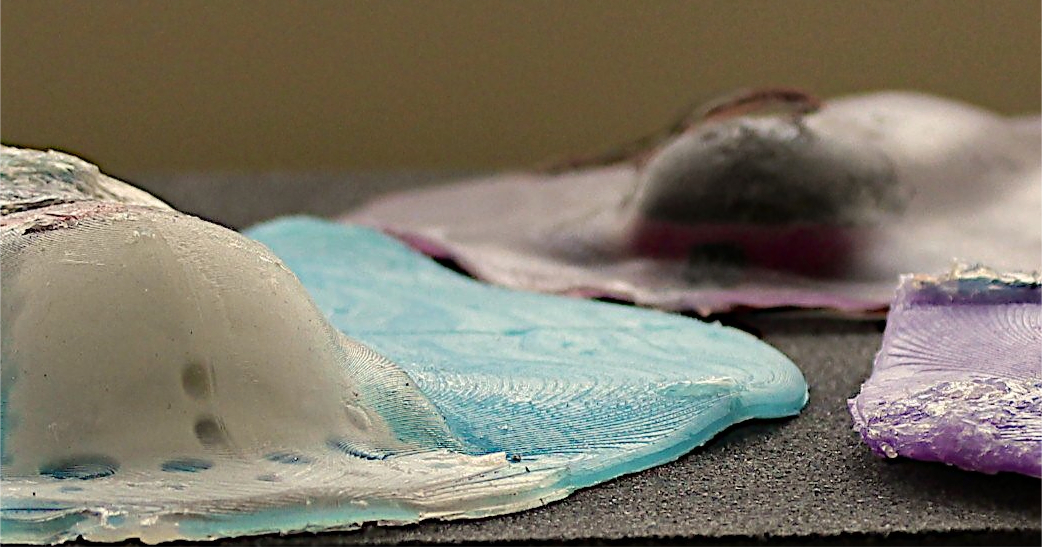
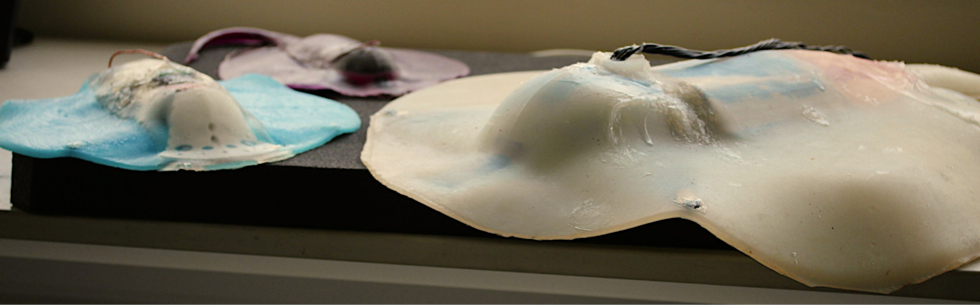

The under-actuated soft robot approach can be applied to more complex locomotion kinematics involving planar and torsional vibrations. Batoids (manta rays, stingrays, etc) propel themselves by generating traveling waves along the length of their pectoral fins. In this design a flexible body can replicate traveling waves with different amplitude envelopes, wave lengths, and frequencies with minimal actuation.
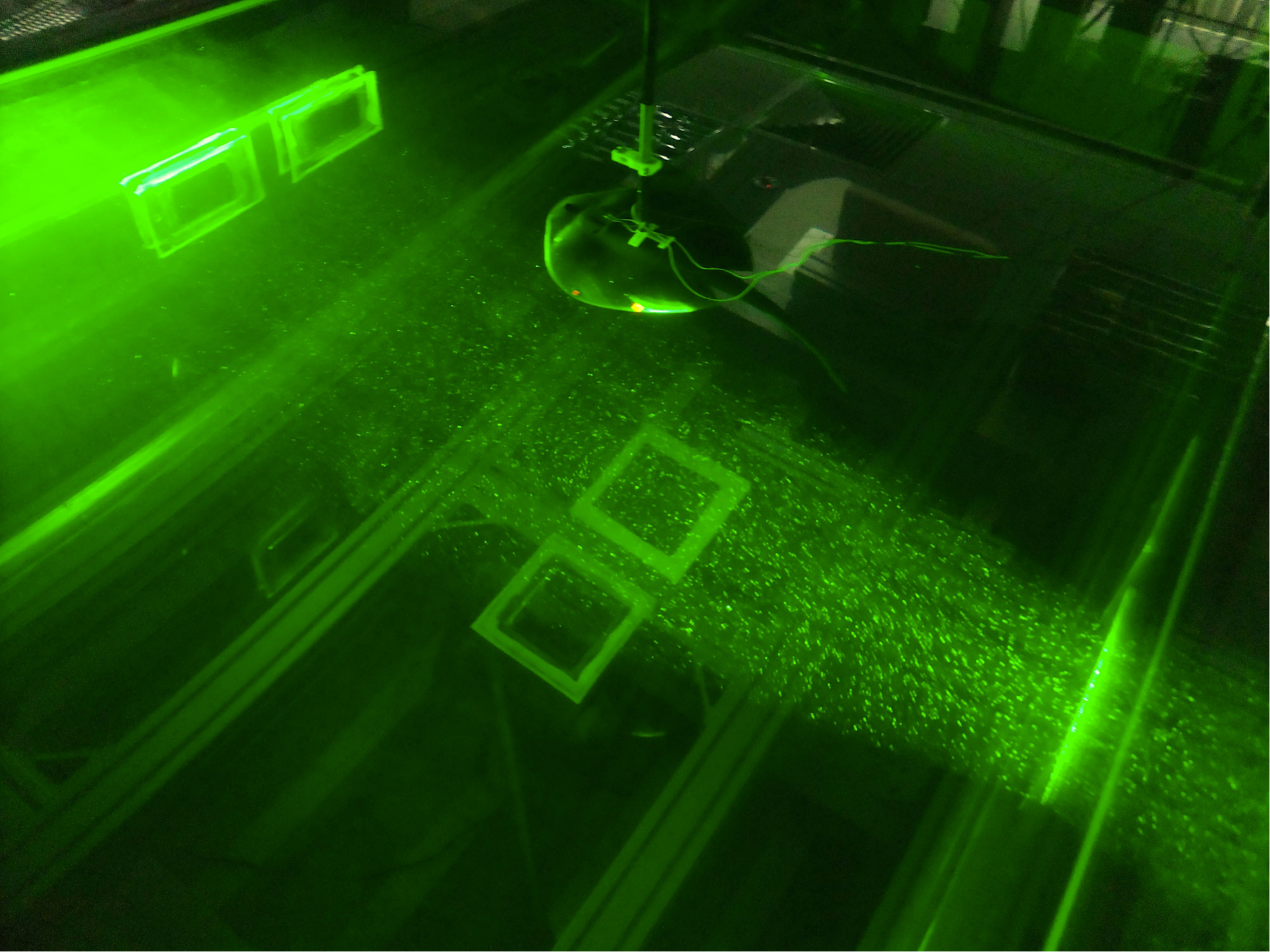
The movies below give a good sense of the capabilities of these robots.
MOVIES:
Stingray side view (slow motion)
Stingray turning
Open loop maneuvering
{kind=link}